11月20日-21日,由車雲網主辦,電動邦協辦的“2019中國安全產業大會暨第三屆交通安全產業峰會”在廣東省佛山市召開。本次峰會以“安全出行 智享未來“為主題,下設新能源汽車安全專場、新技術安全專場以及智慧交通安全專場三大分會場。來自產、學、研等和出行安全相關的企業代表齊聚佛山,共同探討新四化背景下汽車行業產生的安全新問題。峰會期間,北京理工睿行電子科技有限公司CEO金燁發表了主題為汽車中的高分辨毫米波雷達的演講。

以下為演講實錄:
我的演講主題是智能汽車中的高分辨毫米波雷達。我來自理工睿行,將軍用毫米波雷達技術用在民用中,為民生安全保駕護航。
智能汽車對毫米波雷達的需求,根據維基百科統計出來的數據來看,每一萬輛車就有1.93人的死亡率,滴滴出行報告中顯示出來,北京、上海、廣州三個城市交通擁堵率和通行時間是最長的,對於降低事故率和提高交通的智能化水準是有著急切需求的。在中國自動駕駛2025技術路線圖中指出,,中低級別的智能汽車裝載高級輔助駕駛系統後,要求事故率至少減輕30%以上;高級別的智能汽車裝載無人駕駛系統後,要求事故率降低到80%以上,並且要求零死亡率。
對於交通這一塊需要智能感知來實現智能決策、智能規劃,提升通行效率。因此,智能汽車具有了重要的戰略發展意義,無論是中國的政策,還是世界的政策,智能汽車都是國際競爭的熱點,各國也紛紛頒布政策來促進智能汽車的發展,包括美國、英國、日本、德國等國家在內均有相關的戰略性文件。
談到智能汽車一定會談到核心部件,核心部件首先肯定是要做前端感知,智能汽車前端感知必須是一個高精度傳感器,有很多種類型,包括毫米波雷達、雷射雷達、超聲波雷達和攝影頭,會分置汽車各個角落,實現對周圍環境高精度感知。尤其是前向感知,對於智能汽車來說,性能要求是最為苛刻的。大家看到前向感知的傳感器,首先要求視場角優於90%,才能在盡可能小的盲區下實現觀測,同時要求觀測距離大於200米,實現防撞等輔助駕駛,同時角度分辨率要求是很高的,要求能夠實現前方多車道左右車的高分辨率的分辨,可以把前處的各個車都分辨出來。

我們把傳感器作了一個對比,其中毫米波雷達,探測距離200米以上相對來說遠一點,速度分辨率在所有傳感器中是最高的,角度分辨率是比較好的,當然沒有雷射好,雷射的角度是最高的,環境適應性是最強的,可以全天時全天候。成本居中,超聲波雷達是最高的,毫米波雷達環境適應性強,探測性能佳、成本適中,是前向感知傳感器的熱點。
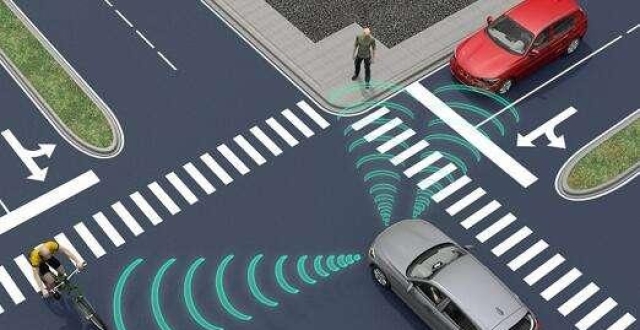
毫米波雷達的工作原理,是通過發射毫米級的電磁波,發射到前方,對障礙物進行探測,通過接受障礙物返回的回波獲取前面障礙物的信息,不受光照強弱影響,即使全黑條件下也可以全天時工作,同時受大氣能見度影響小,可全天候工作,可以作為獨立傳感器也可以作為光學感知雷射傳感器的補充存在。
這是目前來說比較標準的前防撞的毫米波雷達,包括虛擬孔徑技術和超分辨算法,還有LRR+MRR多功能雷達方案,頻段是76-77GHz。有比較常見的雷達演示路試場景,對左右禁止圍欄的探測,也有對接近目標的探測,還有前方多車再加禁止圍欄的探測、在彎道情況下對於兩側護欄的探測以及在隧道情況下對於前方多車遠離的探測,隧道裡面有各種各樣的多徑干擾,對於傳感器要求很高。

還有在城市複雜路口對於汽車、摩托車、行人等複雜的路口進行測試探測。去年和今年其都在美國跟百度阿波羅無人車實行適配和對接測試,與其他車做集成,是無人駕駛,同時還跟北理慧動公司實現雷射、攝影頭、定位定向系統適配,實現北京三環路上複雜路況的無人駕駛。
儘管有很多比較主流的標準的雷達,但是它們同樣存在問題,尤其對於智能汽車,還有L2.5級別以上的駕駛來說,分辨率遠遠不夠。我可以看到汽車雷達和雷射雷達分辨率的對比,雷射雷達對於前方200米的多種目標分辨能力0.3度,超過0.3度的目標是可以分辨出來的,汽車雷達大部分是3度左右的分辨率,做得比較好的進口雷達,1.6度分辨率。這是目前來說市面上汽車雷達存在的問題,角度分辨率低一點,尤其3度的分辨率情況下,200米處分辨率可以達到橫向10米的分辨率,這樣在3個車道內的目標是沒有分開來的。這樣無論是自動駕駛還是汽車防撞來說,都會出現問題。
分辨率低對於遠距的目標分辨率是一個問題,同時對於多目標的識別能力,也是一個問題,由於目標信息量比較少,所以沒有辦法實現對於前方障礙物的目標識別和分類,我們又對比了一下雷射雷達和毫米波雷達,雷射雷達分辨率長高。毫米波雷達一個汽車是一個點,沒有辦法做輪廓的描述,因此對於汽車、行人、大樹來說,雷射雷達可以達到很好識別效果,但是毫米波雷達沒有辦法識別這些目標。

針對剛所說的這種遠距多目標的分辨率的問題,以及多目標識別問題,我們提出一個新的概念,分布式的毫米波雷達,這個概念講的是把多個雷達放到車身前方,協同工作,達到接近雷射分辨率的效果。我們把多個雷達放在汽車前方之後,在後方會有一個預控制器或者融合的處理器,實現對於多部雷達數據的融合處理。
在採用分布式雷達的成像效果和單部雷達成像效果對比中可以看出,如果我們要實現毫米波雷達的高分辨,天線要做得特別大,天線越大,分辨率越高。汽車上沒有辦法這樣做,所以我們想到一個辦法,採用部小雷達,實現大的天線孔徑的虛擬,這樣子多個小雷達可以實現協同工作,既實現了方便的小空間,同時安裝比較方便,每一個小雷達做什麽也比較好實現,同時分辨率是可以達到0.3度的分辨率。
因此可以看到,我們分布式雷達協同分布後提高,紅色是經過合成虛擬大孔徑之後的分辨率,大概兩到三倍程度的提高,藍色是多部雷達。
三個雷達可以實現融合,得到三維高精度點融數據,描述空間分布和散射強度信息,效果和雷射雷達一模一樣。同時每一個雷達都可以獨立工作,可以進行獨立的高精度的點雲成像,可以在後面處理,達到雷射雷達的效果。

目前來說,我們雷達的探測距離,分布式雷達探測距離250米,它的前方左右像分辨率可以達到0.3度,去年我發布的單個分辨率0.7度,現在分布式的毫米波雷達分辨率0.3度。
還有俯仰角,對於目標三維立體的成像,這是單個雷達的成像效果,夜晚的成像效果,我們可以看到這是0.7度分辨率,可以看出每幀30萬點到50萬點,同時會有小汽車的輪廓,單個小雷達已經具備一定目標識別能力,多個雷達目標識別能力進一步提高。
我們是採用了多種毫米波雷達融合的形式實現與雷射雷達媲美的效果,同時基於毫米波點雲數據實現障礙物識別,同時不僅僅是說有三維信息,還有一維速度信息,因此是四維分布式雷達效果。
我們這個公司在雷科防務旗下子公司,有很深的毫米波雷達技術專業背景,北京理工大學毛二可院士創新團隊成立。面向智能網聯不同層次研發不同的產品,針對傳感器研發導航雷達、圖像等相關產品,針對高級輔助駕駛系統層,研發了AEBS、FCW、BSD,面向智能網聯繫統建設車路協同系統。
傳感器層汽車雷達這一塊,我們有幾類雷達,包括市面上常見的前防撞雷達和角雷達,還有點雲雷達、泊車雷達,主要是面向地照射,實現對於低矮障礙物的探測,對於障礙物高度探測精度達到5厘米,實現汽車對於車位的自主查找。交通雷達實現250米以內的八車道多目標的探測,同時可以與攝影頭和邊緣計算節點共組建智能網聯路測系統。
高級輔助駕駛系統,我們和平行兄弟公司一起完成,研發自動緊急製動系統,前方預警,側方盲區檢測、疲勞駕駛預警、倒車防撞製動,後方碰撞預警系統。高級輔助駕駛系統,主要適用於危險品、重載貨車、長途客車、校車,像全國前後裝提解決方案。
我的演講到此結束,感謝大家。