渾圓栗子 發自 凹非寺
量子位 出品 | 公眾號 QbitAI
某子:子非魚,安知…
SoFi:就你話多…

遙遠的南太平洋,斐濟的彩虹礁,幾乎通體雪白的魚搖擺著尾鰭,自在地遊走。不論直線還是轉彎,上浮還是下沉,都優雅流暢。它看上去和珊瑚礁的其他居民並沒有什麽不同,也沒有引起誰的注意。
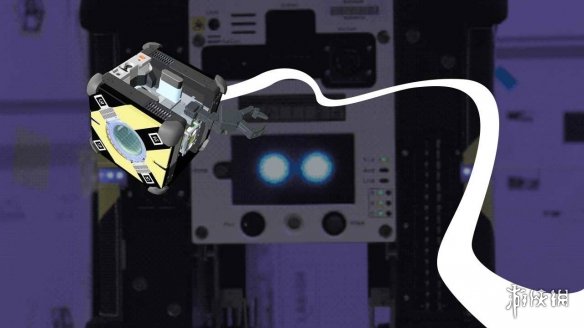
不過,它沒有魚的脊骨,也沒有魚的髒器,取而代之的是電子元件的組合。尾鰭的擺動也並非歸功於肌肉和鱗片,而是液壓泵。

△電子元件在頭部
這是來自麻省理工學院電腦科學與人工智能實驗室 (MIT CSAIL) 的機器魚SoFi。作為被科研團隊寄予厚望的機器人,它雖然還不算完美,但已解決了水下無人機面對的一些重要問題。
三門功課同步學
首先是通訊問題。由於無線電的水下傳播能力非常有限,有效距離僅有幾厘米,水下無人機通常需要以物理方式與船隻相連。

△不是聽力問題,是無線電的錯
SoFi的不同之處則在於,其利用聲學通訊系統代替無線電,聲波不僅可以傳得更遠,對能量的需求也比較低。
這樣一來,通過機身攝影頭與SoFi共享視野的潛水員,可以在距離機器人約20米遠處,利用聲波來操控SoFi改變運動速度,完成特定的動作,或朝特定的方向轉彎。
其次是“姿勢”問題。傳統機器人的執行器 (電機) 通常體積較大,產生的動作也並不十分流暢。
SoFi的尾部設有兩個像氣球一樣的空腔,注滿水後機器人便可以遊動起來。當其中一個空腔開始擴大,它便會向另一側彎曲;而當唯一電機將水推向另一側,另一空腔則會朝反方向彎曲。這樣一來,水循環達成,機器人就可以像魚一樣左右搖擺著向前遊動了。

△軟體機器人不怕撞
只要改變SoFi體內水的流動規律,便能夠調整尾部的動作,從而改變它的運動速度。平均來說,SoFi的秒速接近半個身體的長度。
第三個問題是,游泳消耗的能量非常可觀。魚類需要讓自己時刻保持在某個特定的水深,而在湧動的海水中不停地上下調整,並不是一種高效的方式。
於是,漫長的自然選擇讓魚類擁有了名為鰾的器官,它可以幫助主人獲得最為適宜的浮力。

△Buoyancy Control Unit=浮力控制單元
SoFi也有自己的“鰾”,就是浮力控制單元。那是一個圓柱體結構,通過壓縮和解壓空氣,來實時調整機器人的密度,從而改變浮力,將SoFi保持在所需要的水深。如今,SoFi已經可以依靠壓強控制,潛入約18米深的水下。
另外,SoFi身體兩側有一對鰭,可以調整魚身的俯仰角度,幫助它逐漸向上或向下遊動。
假以亂真,直視無礙
在測試過程中,科研人員發現,一些魚有時會和SoFi一起遊動,可能是產生了好奇。也有時候,魚類完全不受機器人的干擾。相比之下,在潛水員靠近魚類的時候,它們便會迅速遊開去。

△小魚看到大“魚”也並不緊張
也就是說,從外表和運動方式來看,SoFi已是足以亂真的魚了。這意味著,人類可以在更近的距離內觀察珊瑚礁,以及周圍動物的生活。
目前,SoFi尚處於測試階段,仍是通過遙控裝置操縱。不過,未來的更新版本可能搭載電腦視覺,機器人鎖定一條魚,便跟著它一路遊下去,並且不引起魚的懷疑。
科學家們希望,此類機器人可以為研究魚類的集群、洄遊等行為提供幫助,或者在汙染日益嚴重的海域監測某一魚群的健康狀況。而在執行任務的同時,機器人自然的運動不會擾亂所在海域的正常生態。
還有彩蛋
今日最佳:SoFi的遙控器,是超級任天堂搖桿。

△你對“沉浸式”遊戲體驗一無所知
—完—