機器之心報導
參與:張倩、澤南、shooting
對於人類來說,製造飛行器總會遭遇很大的挑戰,而在體積較小的情況下,情況會變得更加複雜:我們需要使用最輕質的組件,以為電子設備和推進結構騰位置。近日,哈佛大學的 Noah Jafferis、Farrell Helbling 等人提出了一種尺寸極小的飛行機器人 RoboBee X-Wing,研究登上了最近出版的《自然》雜誌封面。

顧名思義,這是一種與昆蟲大小相當的飛行器,可以短時間無約束飛行。RoboBee 重量僅為 90 毫克,由兩個壓電傳動裝置驅動,四張可以往複運動的「翅膀」,另有一組 60 毫克的光伏陣列,以及一個 91 毫克的信號發生器。RoboBee 擁有與昆蟲相近的推進效率。

就在這個星期,X-Wing 宣告起飛。

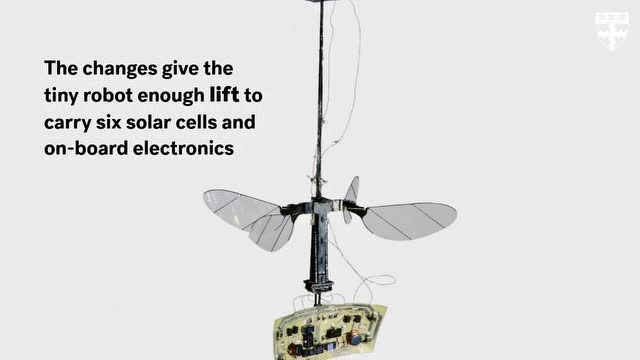
新版 RoboBee X-Wing 以太陽能電池、一對額外的翅膀和改進的製動器為特色,它可以在短時間內無約束地飛行。圖源:Harvard Microrobotics Lab
第一代機器蜂設計得非常像蜜蜂,以蜜蜂大小的兩翼為特徵。畢竟,有著兩翼的蜜蜂可以做很多事,所以為什麽機器人不能呢?結果發現,有很多因素決定了帶有翅膀的機器人無法做到蜜蜂能做的事,至少目前是這樣。比如像偏航控制這種事情對機器人來說就不容易,這也是為什麽使用四翼而不是兩翼設計的機器蜂更有吸引力。
今年的 ICRA 大會上展示了一些令人印象深刻的研究,證實了使用兩翼做到偏航控制的可能,但四翼有額外的優勢——即更多的翅膀意味著更大的動力,可以提起更多東西。而有了更大的提升力,就有可能設計一隻完全獨立的機器人昆蟲,即使它的外形看起來有點怪怪的。
在本周發布的《Nature》上,來自哈佛 Microrobotics Lab 的研究者展示了一款四翼的 RoboBee。RoboBee 是一款小型的雙翼機器人,模仿蜜蜂的設計,目的是創造模仿真實蜜蜂行為的機器人蜂群。研究者將這款四翼機器人稱為 RoboBee X-Wing。它由太陽能電池和光源供電,可以自由飛行。
應該指出,這不是第一個能夠飛行的光能獨立有翅機器蟲。在去年的 ICRA 上,來自華盛頓大學的團隊展示了一個具有兩個翅膀的機器飛蟲,可以在雷射打到其太陽能電池上時起飛。但哈佛的研究者表示,他們的機器蜂是可以「持續」飛行的,而不僅僅是起飛。
機器蜂 X-Wing 長 5 厘米,重 259 毫克,頂部裝有太陽能電池,底部是驅動電路,用以將來自太陽能電池板的電壓提高到 200 伏,以驅動製動器,使得翅膀能以 200Hz 的頻率震動。
這麽排列機器蜂的部件是為了讓太陽能電池板遠離翅膀扇起的氣流,同時將重心保持在翅膀的位置。該機器蜂沒有任何的自動控制,但對於持續時間不到一秒的開環飛行,它足夠穩定。

選用太陽能電池是因為該機器人無法舉起可以為其翅膀供能的電池,因此需要體外供能。UW 使用了雷射,但 X-Wing 使用了太陽能。它需要的能量要由三個太陽級別的光照來提供,因為一個不夠用。
研究者用一些強光燈模擬了供電過程。這意味著 X-Wing 現在還無法在室外運行,儘管他們表示下一步要將機器人的尺寸增加 25%,而需要的太陽光照水準也將降到 1.5 個。
就目前的版本來說,機器蜂 X-Wing 夠輕,還可以裝一些傳感器之類的東西,但研究者似乎更加關心如何將其所需的能量降到一個太陽或以下。達到這一目標需要一些設計上的優化和額外的集成工作。
最後,機器蜂的名字不由得讓我們想起科幻劇集《黑鏡》的某一集……

未來的某一天,自然環境中的蜜蜂種群縮小到了無法接受的程度,為了傳播花粉,人類開發了機器蜂取而代之。
參考內容:
https://www.nature.com/nature/volumes/570/issues/7762
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/solar-powered-robobee-xwing-flies-untethered
本文為機器之心報導,轉載請聯繫本公眾號獲得授權。
------------------------------------------------









