冥冥遑遑
雲遊四方
大家還記得上周 Uber 撞死行人的事兒麽。
事情發生以後,在 Uber 和豐田宣布暫停自動駕駛測試之後,昨天連英偉達也宣布暫停自動駕駛測試項目。
可能大家還有些疑惑,怎麽英偉達也摻和到自動駕駛裡面了?
其實。。為了搶佔自動駕駛領域的制高點,大家都拚了。。
自動駕駛領域相關公司

幾乎你所有聽到過的大型科技企業,要麽親自投身於自動駕駛開發,要麽就作為硬體提供商,實在兩者都不行的那種,也會拿出一些錢來投資。。
主要是,這兩年人工智能進步神速,CPU、GPU 發展也快,各種傳感器大步向前,都讓人們看到了實現自動駕駛實現的曙光。。
說實話,汽車作為人們的代步工具,太久沒有革命性創新了。。
60年代法拉利 GTO 250,最高時速 280 公里/小時

幾十年來,也就是改善下車型,減小車輛阻力。
或者提高一些燃料效率,提供稍微大點的推動力。
直到 08 年特斯拉 Roadster 的出現,給人們帶來真正量產的電動跑車,人們才發現,哦,原來這TM也行。。
第一代 Tesla Roadster

不知道是不是 Tesla 的面世,刺激了汽車領域的變革。。
2010 年,谷歌高調宣布開始研發自動駕駛汽車。
自動駕駛車基本由傳統車改裝而來

開車不動手,吃著火鍋唱著歌,目的地就到了,估計是所有司機夢寐以求的事情吧。。
可惜這事兒以前也隻敢在科幻電影裡面演演,生活中就沒有啥實質上的進步。
也不是傳統廠商沒努力,而是以前,傳統車廠一直致力於機械硬體技術,沉浸於第二次工業革命中不可自拔,但自動駕駛,是個軟體活兒,屬於第三次、甚至第四次工業革命產物~
從車上最垃圾的車載系統,大家就可以看出來,傳統車廠是多麽不重視電子和軟體的創新。。
手機都用上 16G 記憶體了,車上的導航還一卡一卡

所以,自動駕駛由集軟體大成者 Google 最先實現,既在意料之外,也在情理之中。
Google 發揮了互聯網企業的巨大優勢,敢於嘗試新技術,很快就迭代出一種最適合自動駕駛的方案。
首先,車輛優先選電動車,混動車也可以行。
自動駕駛領域香餑餑—— 混動 LEXUS RX450h

不是對燒油的無愛,而是實在愛不起。。
電動車能夠很精準的控制車輛,做電機速度閉環簡單;如果是傳統燒油車,今天燒 93 號油,明天燒 95 號油,想建立一個標準動力輸出模型太麻煩。。
處理傳感器數據,消耗的電力特別大,開過車的都知道,燒油供電有多浪費( 不信你開大燈一晚上,保準明天連車都打不著 )。。
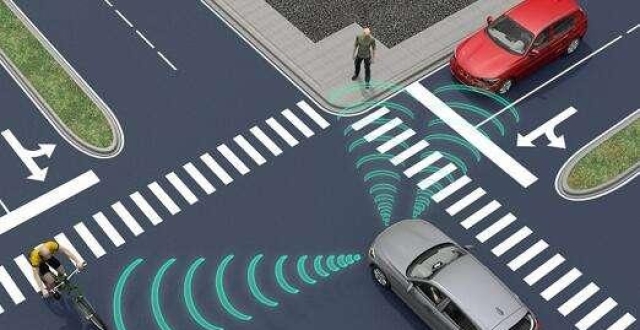
當然,自動駕駛少不了替代人體感官的各種傳感器。

最實用的是雷射雷達( LiDAR ),谷歌家 Waymo 的探測主力就是這個傳感器。
它一般安裝在車輛的頂端,旋轉向四周發射雷射束,通過計算雷射遇到障礙的折返時間,就能算出距離物體的距離,然後利用點雲技術,拚接四周所有的雷射點,形成周圍環境的 3D 影像。
通過特徵識別行人和車輛不成問題

雷射雷達探測範圍廣( 3-50m 不成問題 ),響應更快、不受光線影響,無論是白天還是黑夜都能很好地工作。
作為雷射雷達領域的龍頭老大,Velodyne 去年年底剛剛推出了 128 線的雷射雷達,在精準度和探測距離( 300m )上都有質的飛躍。
128 線比之前的 64 線生成的點雲圖詳細了很多

除了雷射雷達,自動駕駛車上也會安裝多個攝影頭,這些攝影頭一般處於 HDR( 高動態範圍 ) 模式,這樣比較亮和比較暗的地方都能照清楚,滿足不同場景下各自曝光需求~
攝影頭在白天的時候,可以作為自動駕駛的傳感器主力軍,識別路上的各種物體,交通燈、交通標識、行人、車輛等等。。
Intel 收購了視覺傳感器提供商 Mobileye

隨著硬體提高和影像識別的發展,攝影頭髮揮的作用也越來越大,甚至馬斯克就宣稱要放棄雷射雷達,隻用攝影頭和毫米雷達就可以實現自動駕駛。。

毫米雷達和雷射雷達的原理差不多,隻不過毫米雷達發出的不是雷射,而是無線電波。
它相對於雷射雷達的好處,一個是比雷射雷達便宜,另外無線電波的波長比雷射長很多,能輕易穿透雷射很難穿透的雨水灰塵,所以毫米雷達能在比較惡略的氣象下工作~
不過,它只能探測物體遠近,不能探測物體輪廓,所以對人的識別能力不太夠。。
現在大部分車輛使用 77GHz 雷達

自動駕駛還會用到一些熱成像傳感器、超聲波雷達之類的,就不一一展開了。
差評君覺得這些傳感器不分優劣,每個都有自己的優勢和適應的環境,互相結合才能提供更加安全的行駛策略,那些說啥啥傳感器沒有用的言論,要麽是為了省成本,要麽非蠢即壞。
有了傳感器數據,如何用這些數據幫助車輛做出最佳行駛策略,是整個自動駕駛最核心、最值錢的部分~
車輛上的中央控制系統,類似人的大腦,指揮下一步車輛應該如何控制速度和轉角。
整個中控系統的算法極其複雜

不過遇到那種撞一個人還是撞五個人的倫理問題,不同的算法最後做出的決策也不會完全一樣。。

谷歌和百度這種做搜索領域出身的,能在自動駕駛領域後來者居上,也是因為自己在軟體優化算法方面太強了~
每 1000 英裡自動駕駛被人工乾預次數

( 2018 年 1 月美國發布的自動駕駛脫離報告 )
傳統廠商在自動駕駛領域真的是沒啥優勢,除了 GM 和 Nissan 好一點,奔馳的數據簡直讓人不忍直視,天知道讓這種車單獨上路要出多少事。。
大家可能好奇前兩天出事的 Uber 的水準應該如何,紐約時報今年曾經發過一篇報導,它的車每 2.0公里就要被人工乾預一次,水準介於奔馳和 Bosch 博世之間吧。。
現在我們再回頭看當時 Uber 出事的影片。。
行車記錄儀車外錄像

行車記錄儀車內錄像

從錄像上來看,行人在即將錯過車輛的時候被撞了,整個過程 Uber 傳感器幾乎癱瘓,車內安全員玩忽職守,根本沒看路況。。
好多人覺得行人沒有走人行橫線,被撞 Uber 不應該為此負責。
實際上,自動駕駛跟人開車根本不一樣,自動駕駛有各種各樣的傳感器幫助車輛識別周圍環境。
以這個事情為例,行人走的很緩慢,目標體積很大,就算路上沒啥燈,但是雷射雷達和毫米雷達不是瞎子,至少能在 20m 外分辨出前方有人。。
所以,這事兒的發生,更像司機明明早就看到前方有人橫穿馬路,但是走神沒有反應過來撞上去一樣。。

說起來,要是 Uber 自動駕駛技術過硬,慘劇就不會發生。
雖然自動駕駛技術是大勢所趨,甚至是國家戰略所爭,但是畢竟人命關天,監督著發展總沒有錯。。
何況,現在的自動駕駛技術還遠遠沒有達到讓人放心的地步,也許大家覺得人開車出事很常見,但是根據美國的汽車事故統計,人開車駕駛每一億公里才致死 1.18 個人,而目前開車裡程最多的 Waymo,也才累計了 500 萬公里。。
維基百科 :Motor vehicle fatality rate in U.S. by year

我相信,大家未來都能坐著讓人放心的無人車,吃著火鍋唱著歌,四處飛馳,不會太遠,也許 5 年,也許 10 年。
但這技術真正成熟之前,盡量減少像 Uber 這種不必要的過失,是每個自動駕駛廠商的義務,也是所有監管層的責任。。